{kind=link}
Dämpfungs-Glied mit PIC 16F84 und LCD Anzeige
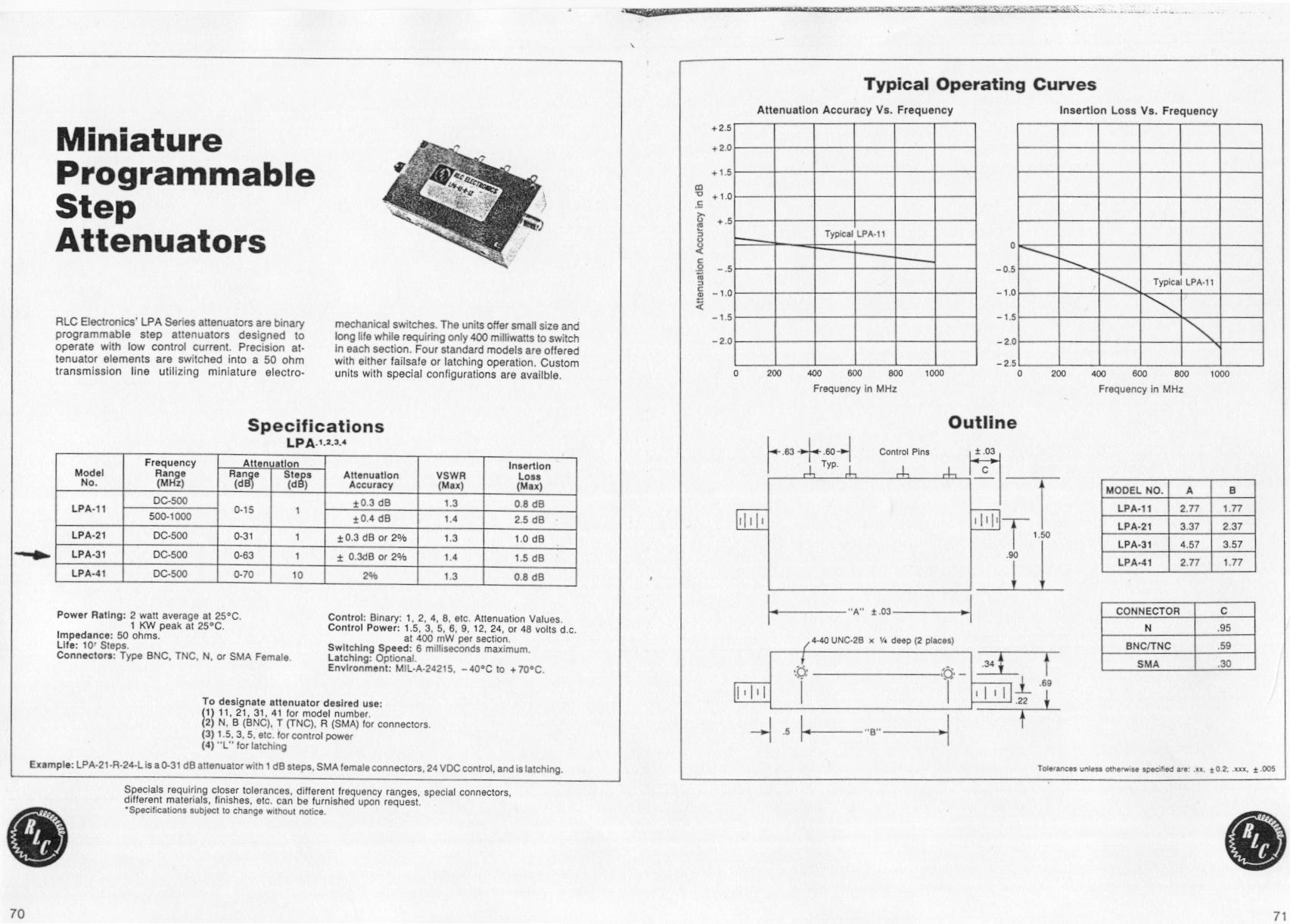
Für Meßzwecke habe ich mir ein Dämpfungsglied mit 1 dB Schritten im Bereich von 0 bis 63 dB, Impedanz 50 Ohm gebaut. Das Dämpfungsglied habe ich bei e-bay gekauft, als gebraucht und funktionsfähig. Für die Umschaltung der Dämpfung hat das Dämpfungsglied 12 V Relais eingebaut, die Stufen haben Dämpfungen in Schritte von 1, 2, 4, 8, 16 und 32 dB. Für 32 dB muss man zwei Relais gleichzeitig einschalten, wahrscheinlich wegen der Größe des Übersprechens zwischen den Stufen, wurden zwei Dämpfungsglieder je 16dB dafür verwendet.
Umschaltungen kann man auch mit mechanischen Schaltern machen, die man je nach Erfordernis einschaltet, aber binäres Einschalten und dekadisches Anzeigen ist ergonomischer als binäres Einschalten und Anzeigen. Interessant sind bei Dämpfungsgliedern sind immer zwei Angaben: Wie groß ist die gesamte Dämpfung durch das Dämpfungsglied und wie groß ist der Dämpfungsunterschied hinsichtlich auf einen früher gespeicherten Wert. Diese zwei Angaben benötigen einen Mikrocontroller mit einem zwei-zeiligen LCD Display. Weil ich beim Programmieren für PIC`s nicht gerade erfahren bin, hat mir dabei Herr Silvo Straser mit Ratschlägen geholfen.
So ist das folgende Schema entstanden:
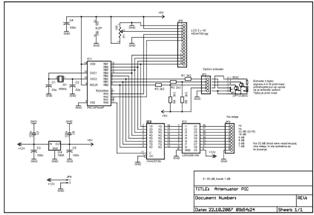
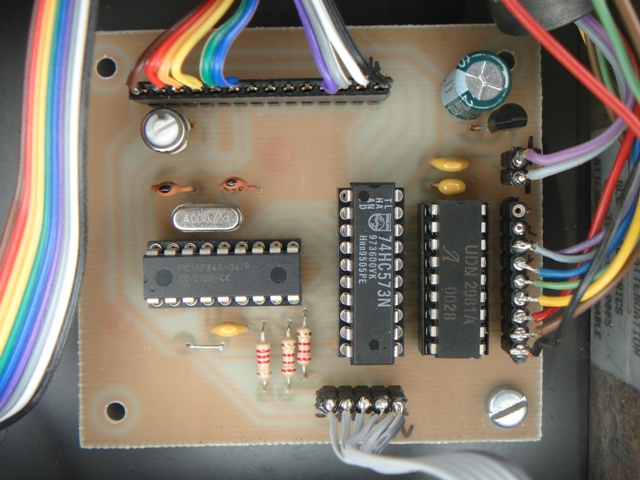
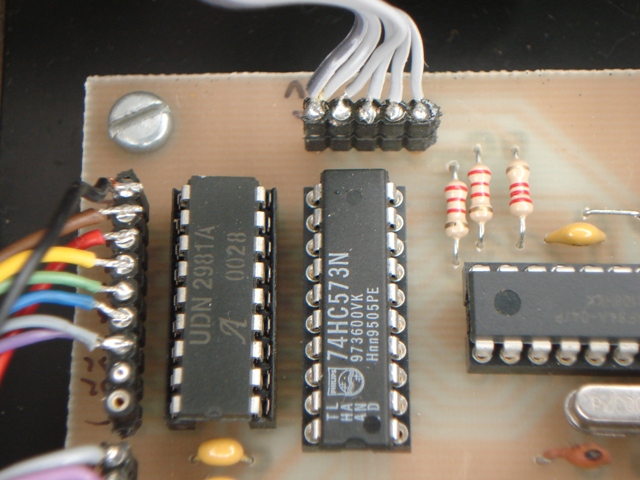
In der Schaltung wurde ein Mikrocontroller PIC 16F84 verwendet, mit einem Quarzoszillator von 4 MHz. Der PIC hat nicht genügend Ausgängen um 8 Relais und ein LCD Display anzusteuern, deswegen wurde auf der Relaisseite ein Zwischengedächtnis eingebaut mit einem 74HC573, der einen übertragenen Wert zwischen speichert mit dem Signal „latch enable“. Auf einigen Ausgängen wurde parallel das Display und die Encodereingänge beschaltet. Für das richtige Zusammenspiel sorgt das Programm im PIC. An den Ausgängen für die Relais wurde ein Verstärker mit UDN2981 eingesetzt, der hat 5 V Eingänge und am Ausgang Transistoren mit offenem Collector, die eine Spannung bis 50 V vertragen können und 500 mA Ausgangsstrom. Schutzdioden von Masse zu Collector sind schon eingebaut, deswegen muss man die nicht außen beschalten.
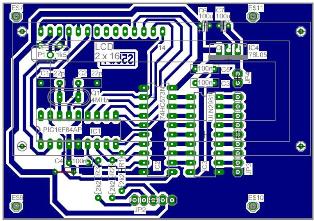
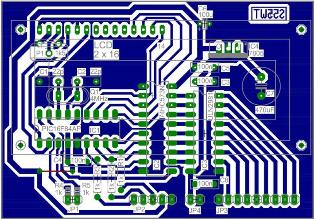
Ich habe zwei Platinen konstruiert, wobei die erste etwas kleinere Dimensionen hat, die habe ich für mich persönlich auch gebaut. Die zweite Platine ist etwas größer konstruiert, so daß die mit dem Display ein Sandwich bilden kann. Durch Zusatzpins können auch freie Kontakte vom Controller angeschlossen werden. Mit einer Programmänderungen ist die Platine auch für andere Zwecke nutzbar.
Zu dem PIC muss man noch ein Programm laden, der HEX Code dafür ist hier, und in Deutsch hier.
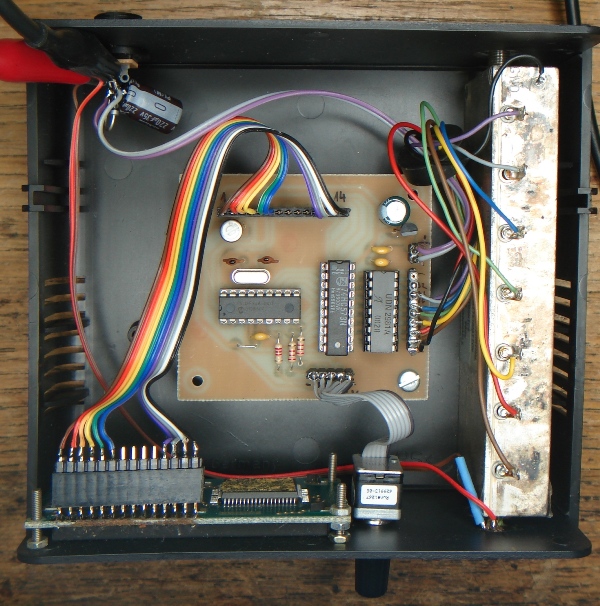
So sieht die Gesamtkonfiguration aus:
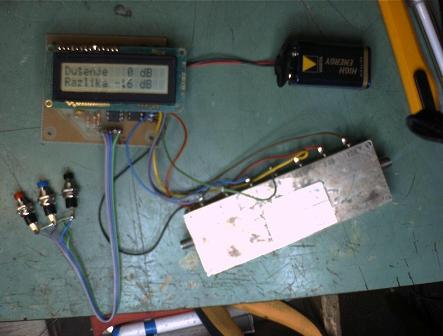
Auf dem oberen Bild sind noch Tasten angeschlossen, die habe ich später mit einem Encoder ersetzt, der auch eine Taste eingebaut hat.
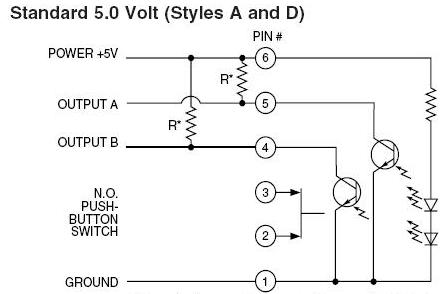
Das Schema des Encoders (Angaben von der Hersteller homepage), die Widerstände R* sollten mindestens einen Wert von 2k2 haben, ich habe 3k3 genommen.
Das Arbeiten, mit einem so aufgebautem Dämpfungsglied ist denkbar einfach, die obere Zeile vom Display zeigt immer die Gesamtdämpfung durch das Dämpfungsglied an. Man kann diesen Wert beliebig auf Null setzen. Die obere Zeile zeigt dann immer noch die absolute Dämpfung an, die untere Zeile zeigt dann jeweils das Delta (die Differenz = +/- gespeicherter Wert – Istwert ) an. An den oberen und unteren Grenzen stoppt die Zählung, so dass ein weiteres Drehen des Encoders keine weitere Reaktion mehr erzeugt, nur eine Drehung in die jeweils andere Richtung betätigt dann wieder die Dämpfungsrelais. Der letzte eingestellte Wert, wird jeweils vor der Spannungsabschaltung im Microcontroller gespeichert und beim Einschalten steht dieser Wert dann wieder zur Verfügung.
Erste Bild zeigt die Anzeige, nach Drücken der Taste. Die Dämpfung über das Dämpfungs-glied ist 30 dB, der Unterschied ist 0 dB.

Der Encoder wurde in positiver Richtung gedreht, der Unterschied ist nun 6 dB, die Gesamt- Dämpfung durch das Dämpfungsglied 36 dB.

Der Encoder wurde nun in negative Richtung gedreht, der Unterschied zu „Null = 30dB“ ist -7 dB, die gesamte Dämpfung durch das Dämpfungsglied beträgt 23 dB.

Die komplette Schaltung benötigt eine 12V Versorgungsspannung, ich habe auf der Versorgungsseite noch eine Schutzdiode eingebaut, die die gesamte Elektronik vor Verpolung der Spannung schützt.
Der Stromverbrauch, wenn die gesamt Dämpfung durch den Dämpfungsmodul auf null eingestellt ist, ist 37 mA, wenn aber alle Relais angezogen sind (63 dB), steigt der Stromverbrauch auf 250 mA. Das alles habe ich in einen Kunststoff gehäuse 150 x 140 x 60 eingebaut (www.conrad.de Art.Nr.: 523178-62) .
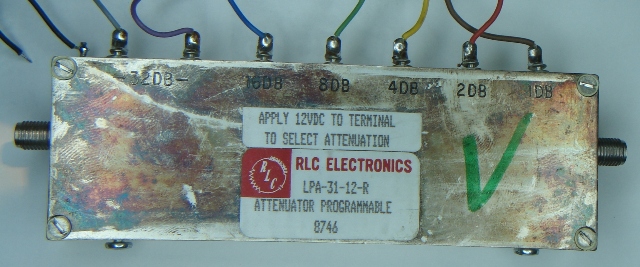
Das Dämpfungsmodul habe ich billig gekauft, konnte es aber auch selber „veredeln“.
Das Modul hat eine Impedanz von 50 Ohm, es könnte prinzipiell aber auch einen anderen Wert haben.
Zuletzt noch ein paar Bilder, die sagen meistens mehr als tausend Worte.
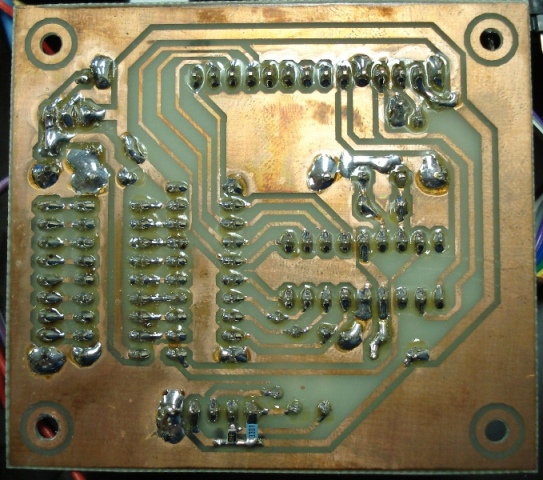
Die SMD-Widerstände von 3k3 haben ihren Platz auf der unteren Seite des Boards, zuerst wollte ich mit drei Tasten arbeiten, die brauchen diese Widerstände nicht, aber später habe ich dann doch lieber den Encoder genommen.
Zuschaltung von LCD und Encoder
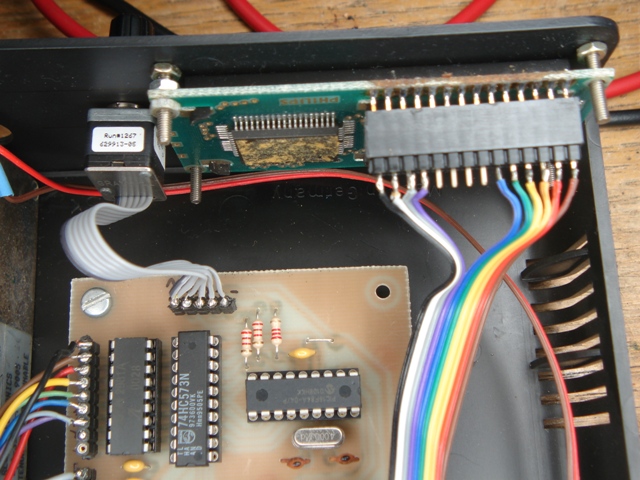
Eingebaut in das Gehäuse und Ansicht der Vorderseite